Robot Arm
This lasted multiple semesters and I was only in the class for the first semester. As such, I didn't get to see the arm used in the real world. But I did develop a great understanding of basic robotic training and the tools used in industry.
 This class was a partnership with GE, hoping to inspire students to develop AI robotic systems for more adaptive production lines. In my semester, there were around 5 teams working on the same learning projects.
This class was a partnership with GE, hoping to inspire students to develop AI robotic systems for more adaptive production lines. In my semester, there were around 5 teams working on the same learning projects.
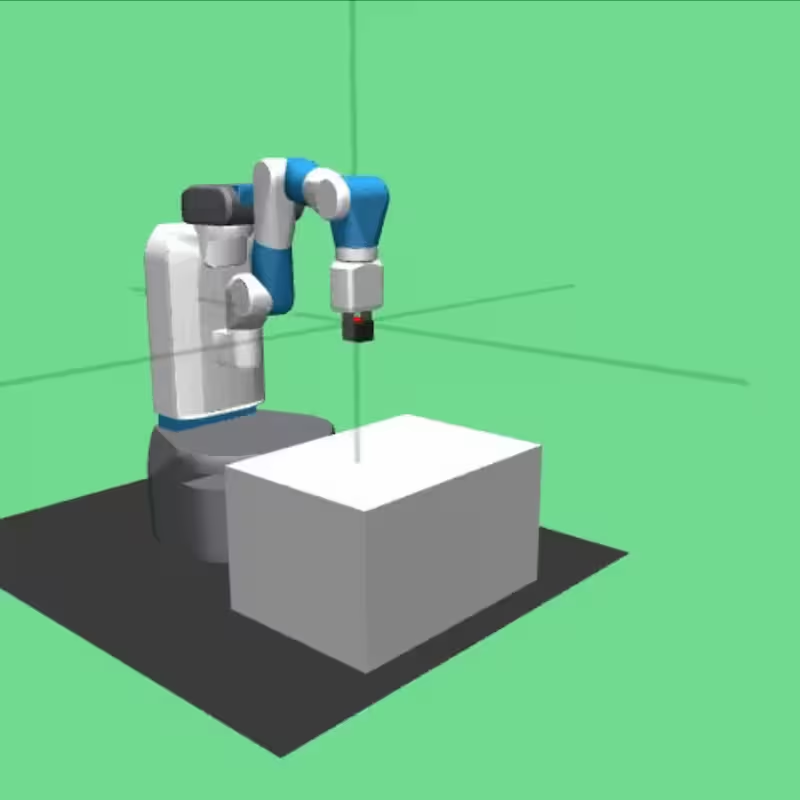
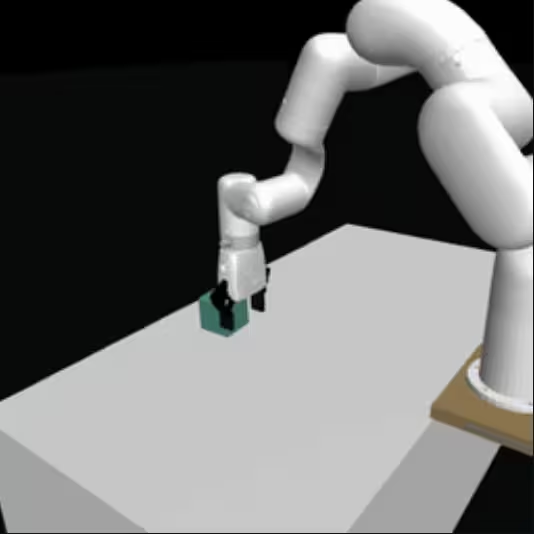
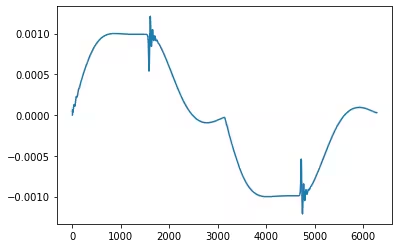 My team wrote python scripts to manually inverse the kinematics of the arm, avoid a barrier, and transfer an object in a random location from one bin to another. We deveolped a trajectory prediction model to avoid collisions and overshooting, which was a big issue in the original code.
My team wrote python scripts to manually inverse the kinematics of the arm, avoid a barrier, and transfer an object in a random location from one bin to another. We deveolped a trajectory prediction model to avoid collisions and overshooting, which was a big issue in the original code.
Our simulation successfully completed the task and reduced noise in the arm's movements by more than 99%. We worked heavily on the math involved in movement of real-world systems.